저번 포스트에서는 라그랑주 역학을 사용하기 위한 수학적 기반인 변분법에 대해 알아보았습니다. 이번 포스트에서는 일반화 좌표계라는 것을 다루어보겠습니다.
일반화 좌표계란?
일반화 좌표계라는 말은 그렇다면 그냥 좌표계와 어떤 차이가 있을까요?
우리가 일반적으로 사용하는 좌표라는 용어는 어떤 위치를 나타내는 수 체계를 의미합니다. 예를 들자면, 우리나라의 위치는 대략 동경 127도에 북위 38도정도입니다. 튜플 형식으로 나타내면 (127E,38N)이라고 쓸 수 있겠습니다. 이것은 구면좌표계로, 구면 위에서 어떤 점을 특정하기 위해 사용합니다. 또 공학에서는 원점으로부터 각 축 방향으로 떨어진 거리를 기준으로 하는 직교좌표계를 많이 사용합니다.
그런데 물리학에서는 이런 좌표계가 불편할 때가 있습니다. 바로 구속 조건이 있는 경우입니다.
구속 조건
물리학에서 구속 조건이란 물체의 움직임을 제한하는 모든 제약을 말합니다. 이해를 돕기 위해 여러 예시를 들어보겠습니다.
-
무한히 넓은 3차원 공간을 떠다니는 기구의 경우, 이 기구의 위치를 제한하는 제약이 아무것도 없습니다. 그래서 이 기구의 위치를 정확하게 알기 위해서는 세 개의 좌표값 모두 알아야 합니다. 관측자로부터의 거리, 방위각, 고도를 기반으로 하는 구면좌표계를 사용할 수도 있겠지만, 어떤 특수한 좌표계를 사용하더라도 반드시 세 개의 값을 알아야만 기구의 위치를 특정할 수 있습니다.
-
그런데 3차원 공간에 걸려 있는 케이블카를 한 번 생각해보겠습니다. 이 케이블카는 로 주어지는 직선 케이블을 따라 움직여야 하고, 케이블을 벗어나 마음대로 움직일 수는 없습니다. 이런 경우에는 값 중 하나만 알아도 케이블카의 위치를 정확하게 결정할 수 있습니다. 셋 중 하나만 알면 나머지 값들은 그것으로부터 결정되기 때문입니다. 이 경우
케이블이 케이블카의 움직임을 제한하는 구속 조건이 됩니다. 이 예시로부터 구속 조건이 생길 경우, 위치를 결정하기 위해 필요한 좌표가 줄어든다는 것을 알 수 있습니다. -
물론 모든 구속조건이 다 그런 것은 아닙니다. 2차원 평면에서 움직이는 자동차를 생각해봅시다. 이 자동차의 경우, 시간을 좀 들이면 2차원 평면의 어디라도 갈 수 있겠지만 국소적으로는 앞뒤로밖에 움직일 수 없습니다. 자동차가 앞을 보고 있는 상태에서, 방향을 바꾸지 않고서 오른쪽으로만 이동할 수는 없을 것입니다. (그랬으면 주차하기가 정말 편했을 텐데요.) 이것 역시 일종의 구속 조건에 해당합니다.
-
기차의 경우도 좋은 구속조건을 가지고 있습니다. 기차가 (높낮이 차이가 있는)땅 위를 달릴 때, 이 기차의 위치를 정확히 알려면 위도, 경도, 고도 세 개의 값을 알아야 합니다. 그러나 기차는 레일 위로만 달릴 수 있으므로, 실제로는 출발지로부터의 거리만 알면 기차의 위치를 정확히 특정할 수 있습니다. (갈림길 등은 없다고 칩시다.) 이것 역시 구속 조건에 해당합니다.
홀로노믹 구속과 논홀로노믹 구속
이러한 구속 조건은 홀로노믹 구속과 논홀로노믹 구속으로 나눌 수 있습니다. 홀로노믹 구속이란 위 예시들 중 2, 4번과 같이 구속조건이 오직 물체의 위치와 시간에만 의존하는 구속입니다. (다만 2번, 4번 예시 모두 시간에는 의존하지 않습니다.) 즉, 개 입자들의 위치 관계를 아래와 같이 표현할 수 있는 구속을 홀로노믹 구속이라고 합니다.
2번 예시의 케이블카에서는 (하나의 식으로 표현하기는 했지만)아래와 같은 두 개의 구속조건이 있었습니다.
반대로 논홀로노믹 구속의 경우 3번 조건과 같이 물체의 위치와 시간뿐만이 아니라 다른 요소에도 의존하는 구속을 말합니다. 3번 예시에서는 방향이 구속 조건에 포함되어있으므로 이는 논홀로노믹 구속에 해당합니다.
자유도
물체의 위치를 표현하기 위한 최소 좌표의 개수를 자유도라고 부르는데, 위 예시에서 볼 수 있듯이 홀로노믹 구속이 있으면 물체의 자유도가 줄어듭니다. 좀더 정확히는 개의 입자가 있는 차원 시스템에 개의 홀로노믹 구속이 있을 때 이 시스템은 의 병진 자유도를 가집니다. 위 케이블카 예시의 경우 1개의 입자가 있는 3차원 시스템에서 구속 조건이 2개이므로 이 되고, 따라서 자유도가 1이 됨을 수학적으로 확인할 수 있습니다.
첫 문단에서, 물리학에서는 평범한 좌표계가 불편할 수 있다고 했었는데, 그 이유가 여기 있습니다. 구속 조건이 있으면 자유도가 줄어들기 때문에 훨씬 적은 개수의 변수만 사용해서 시스템을 분석할 수 있기 때문입니다.
일반화 좌표
이렇게 구속 조건이 있는 경우 시스템을 효율적으로 분석하기 위해, 어떤 시스템을 기술하기 위해 꼭! 필요한 개의 변수만을 모아놓은 것을 일반화 좌표계라고 부릅니다. 가장 직관적인 예는 이중진자입니다.
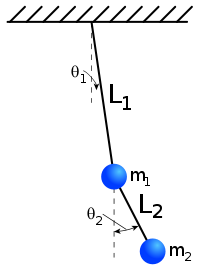
위 그림과 같은 2차원 이중진자의 경우, 이를 나타내기 위해서는 총 4개의 좌표값(첫 번째 진자의 좌표값, 두 번째 진자의 좌표값)이 필요합니다. 그런데 진자는 다음과 같은 두 개의 구속 조건을 가지고 있습니다.
그러므로 계산해보면 의 자유도를 가지므로, 2개의 변수만으로 이 시스템을 설명할 수 있음을 알 수 있습니다. 위 그림에서는 그 변수, 즉 일반화 좌표계를 각 진자가 수직선과 이루는 각도인 로 잡았습니다.
물론 일반화 좌표계는 진짜 시스템을 설명할 수 있는 변수 두 개만 있으면 되는 거라, 시스템을 제대로 설명할 수만 있다면 아무렇게나 잡아도 됩니다. 예를 들어 첫 번재 진자의 위치와 두 번째 진자의 각도 값 를 일반화 좌표로 해도 문제가 없습니다.
다만 첫 번째 진자의 값을 일반화 좌표로 선택하면 안 됩니다. 왜냐하면 같은 값을 가지는 위치가 유일하지 않기 때문입니다. 값을 선택한 것은 위 그림에서 위쪽이 막혀 있으니 그렇게 잡은 것이고, 만약 진자가 원점보다 더 높은 위치까지 흔들릴 수 있다면 같은 값을 갖는 위치가 두 개가 될 수 있으니 이렇게 잡아서는 안됩니다.
일반화 속도
이제 일반화 좌표를 알았으니 마지막으로 일반화 속도를 정의해보겠습니다. 그냥 좌표계에서 속도가 다음과 같이 정의되므로
알반화 좌표계에서는 이와 마찬가지로 다음과 같이 속도를 정의할 수 있습니다. (물리학에서는 변수 위에 점을 붙여 미분을 표시합니다. 프라임()과 동일합니다.)
예를 들어 수직선과의 각도를 일반화 좌표로 하는 단진자의 경우, 일반화 속도는 진자의 각속도가 됩니다.
어째 포스트가 갑자기 끊긴 것 같다면 정상입니다. 원래 여기다가 라그랑지언 포스트까지 쓰려다가 너무 길어져서 잘랐습니다.